Inverted Pendulum on a cart. More...
#include <dynamic-graph/tutorial/inverted-pendulum.hh>
Public Member Functions | |
| InvertedPendulum (const std::string &inName) | |
| Constructor by name. More... | |
| ~InvertedPendulum () | |
| virtual const std::string & | getClassName (void) const |
| Each entity should provide the name of the class it belongs to. More... | |
| virtual std::string | getDocString () const |
| Header documentation of the python class. More... | |
| void | incr (double inTimeStep) |
| Integrate equation of motion over time step given as input. More... | |
Parameters | |
| void | setCartMass (const double &inMass) |
| Set the mass of the cart. More... | |
| double | getCartMass () const |
| Get the mass of the cart. More... | |
| void | setPendulumMass (const double &inMass) |
| Set the mass of the cart. More... | |
| double | getPendulumMass () const |
| Get the mass of the pendulum. More... | |
| void | setPendulumLength (const double &inLength) |
| Set the length of the cart. More... | |
| double | getPendulumLength () const |
| Get the length of the pendulum. More... | |
 Public Member Functions inherited from dynamicgraph::Entity Public Member Functions inherited from dynamicgraph::Entity | |
| Entity (const std::string &name) | |
| virtual | ~Entity () |
| const std::string & | getName () const |
| bool | hasSignal (const std::string &signame) const |
| SignalBase< int > & | getSignal (const std::string &signalName) |
| const SignalBase< int > & | getSignal (const std::string &signalName) const |
| std::ostream & | displaySignalList (std::ostream &os) const |
| virtual std::ostream & | writeGraph (std::ostream &os) const |
| virtual std::ostream & | writeCompletionList (std::ostream &os) const |
| virtual void | display (std::ostream &os) const |
| virtual void | commandLine (const std::string &cmdLine, std::istringstream &cmdArgs, std::ostream &os) |
| virtual SignalBase< int > * | test () |
| virtual void | test2 (SignalBase< int > *) |
| const std::string & | getCommandList () const |
| CommandMap_t | getNewStyleCommandMap () |
| command::Command * | getNewStyleCommand (const std::string &cmdName) |
| SignalMap | getSignalMap () const |
Static Protected Attributes | |
| static const std::string | CLASS_NAME |
| More... | |
Additional Inherited Members | |
| Public Types inherited from dynamicgraph::Entity | |
| typedef std::map< std::string, SignalBase< int > * > | SignalMap |
| typedef std::map< const std::string, command::Command * > | CommandMap_t |
| Protected Member Functions inherited from dynamicgraph::Entity | |
| void | addCommand (const std::string &name, command::Command *command) |
| void | entityRegistration () |
| void | entityDeregistration () |
| void | signalRegistration (const SignalArray< int > &signals) |
| void | signalDeregistration (const std::string &name) |
| Protected Attributes inherited from dynamicgraph::Entity | |
| std::string | name |
| SignalMap | signalMap |
| CommandMap_t | commandMap |
Inverted Pendulum on a cart.
This class represents the classical inverted pendulum on a cart. The equation of motion is:

where
 represented by signal stateSOUT,
represented by signal stateSOUT,  is the position of the cart on an horizontal axis,
is the position of the cart on an horizontal axis,  is the angle of the pendulum with respect to the vertical axis,
is the angle of the pendulum with respect to the vertical axis,  reprensented by signal forceSIN,
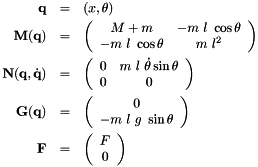
reprensented by signal forceSIN, A more natural form of the above equation for roboticists is
![\[ \textbf{M}(\textbf{q})\ddot{\textbf{q}} + \textbf{N}(\textbf{q},\dot{\textbf{q}})\dot{\textbf{q}} + \textbf{G}(\textbf{q}) = \textbf{F} \]](form_5.png)
where
In order to make the system intrinsically stable, we add some viscosity by rewriting:

where  is a positive coefficient.
is a positive coefficient.
| dynamicgraph::tutorial::InvertedPendulum::InvertedPendulum | ( | const std::string & | inName | ) |
Constructor by name.
| dynamicgraph::tutorial::InvertedPendulum::~InvertedPendulum | ( | ) |
|
inline |
Get the mass of the cart.
|
inlinevirtual |
Each entity should provide the name of the class it belongs to.
Implements dynamicgraph::Entity.
References CLASS_NAME.
|
inlinevirtual |
Header documentation of the python class.
Reimplemented from dynamicgraph::Entity.
References incr().
|
inline |
Get the length of the pendulum.
|
inline |
Get the mass of the pendulum.
| void dynamicgraph::tutorial::InvertedPendulum::incr | ( | double | inTimeStep | ) |
Integrate equation of motion over time step given as input.
Referenced by getDocString().
|
inline |
Set the mass of the cart.
|
inline |
Set the length of the cart.
|
inline |
Set the mass of the cart.
|
staticprotected |
Referenced by getClassName().
 1.8.11
1.8.11 
