step-observer.h File Reference
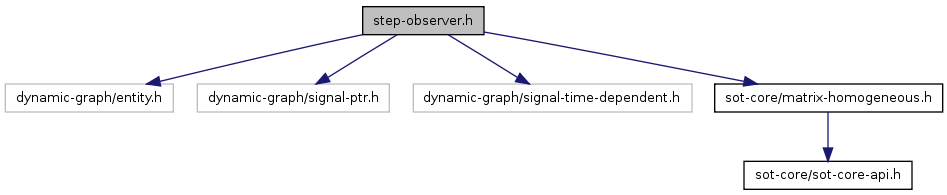
#include <dynamic-graph/entity.h>#include <dynamic-graph/signal-ptr.h>#include <dynamic-graph/signal-time-dependent.h>#include <sot-core/matrix-homogeneous.h>
Include dependency graph for step-observer.h:
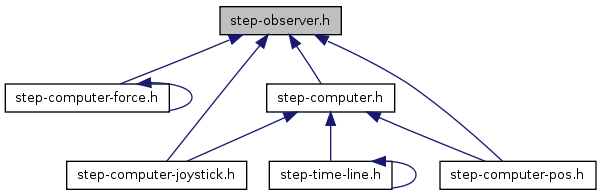
This graph shows which files directly or indirectly include this file:
Classes | |
| class | sot::StepObserver |
| Computes a reference frame from the position of both hands and feet of the robot. More... | |
Namespaces | |
| namespace | sot |
Defines | |
| #define | StepObserver_EXPORT |
Define Documentation
| #define StepObserver_EXPORT |