#include <sot/core/constraint.hh>
Public Member Functions | |
| virtual const std::string & | getClassName (void) const |
| Constraint (const std::string &n) | |
| void | addJacobian (Signal< ml::Matrix, int > &sig) |
| void | clearJacobianList (void) |
| void | setControlSelection (const Flags &act) |
| void | addControlSelection (const Flags &act) |
| void | clearControlSelection (void) |
| ml::Matrix & | computeJacobian (ml::Matrix &J, int time) |
| virtual void | commandLine (const std::string &cmdLine, std::istringstream &cmdArgs, std::ostream &os) |
Static Public Attributes | |
| static const std::string | CLASS_NAME |
Protected Types | |
| typedef std::list< Signal < ml::Matrix, int > * > | JacobianList |
Protected Attributes | |
| JacobianList | jacobianList |
Friends | |
| SOTCONSTRAINT_EXPORT friend std::ostream & | operator<< (std::ostream &os, const Constraint &t) |
typedef std::list< Signal<ml::Matrix,int>* > dynamicgraph::sot::Constraint::JacobianList [protected] |
| dynamicgraph::sot::Constraint::Constraint | ( | const std::string & | n | ) |
| void dynamicgraph::sot::Constraint::addControlSelection | ( | const Flags & | act | ) |
| void dynamicgraph::sot::Constraint::addJacobian | ( | Signal< ml::Matrix, int > & | sig | ) |
| void dynamicgraph::sot::Constraint::clearControlSelection | ( | void | ) |
| void dynamicgraph::sot::Constraint::clearJacobianList | ( | void | ) |
| virtual void dynamicgraph::sot::Constraint::commandLine | ( | const std::string & | cmdLine, |
| std::istringstream & | cmdArgs, | ||
| std::ostream & | os | ||
| ) | [virtual] |
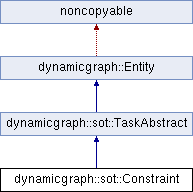
Reimplemented from dynamicgraph::sot::TaskAbstract.
| ml::Matrix& dynamicgraph::sot::Constraint::computeJacobian | ( | ml::Matrix & | J, |
| int | time | ||
| ) |
| virtual const std::string& dynamicgraph::sot::Constraint::getClassName | ( | void | ) | const [inline, virtual] |
Implements dynamicgraph::Entity.
| void dynamicgraph::sot::Constraint::setControlSelection | ( | const Flags & | act | ) |
| SOTCONSTRAINT_EXPORT friend std::ostream& operator<< | ( | std::ostream & | os, |
| const Constraint & | t | ||
| ) | [friend] |
const std::string dynamicgraph::sot::Constraint::CLASS_NAME [static] |

