integrates an ODE using a naive Euler integration. TODO: change the integration method. For the moment, the highest derivative of the output signal is computed using the previous values of the other derivatives and the input signal, then integrated n times, which will most certainly induce a huge drift for ODEs with a high order at the denominator. More...
#include <sot/core/integrator-euler.hh>
Public Member Functions | |
| virtual const std::string & | getClassName (void) const |
| IntegratorEuler (const std::string &name) | |
| virtual | ~IntegratorEuler (void) |
| sigT & | integrate (sigT &res, int time) |
Static Public Member Functions | |
| static std::string | getTypeName (void) |
Static Public Attributes | |
| static const std::string | CLASS_NAME |
Protected Attributes | |
| std::vector< sigT > | inputMemory |
| std::vector< sigT > | outputMemory |
integrates an ODE using a naive Euler integration. TODO: change the integration method. For the moment, the highest derivative of the output signal is computed using the previous values of the other derivatives and the input signal, then integrated n times, which will most certainly induce a huge drift for ODEs with a high order at the denominator.
| dynamicgraph::sot::IntegratorEuler< sigT, coefT >::IntegratorEuler | ( | const std::string & | name | ) | [inline] |
| virtual dynamicgraph::sot::IntegratorEuler< sigT, coefT >::~IntegratorEuler | ( | void | ) | [inline, virtual] |
| virtual const std::string& dynamicgraph::sot::IntegratorEuler< sigT, coefT >::getClassName | ( | void | ) | const [inline, virtual] |
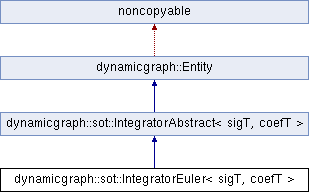
Reimplemented from dynamicgraph::sot::IntegratorAbstract< sigT, coefT >.
| static std::string dynamicgraph::sot::IntegratorEuler< sigT, coefT >::getTypeName | ( | void | ) | [inline, static] |
Reimplemented from dynamicgraph::sot::IntegratorAbstract< sigT, coefT >.
| sigT& dynamicgraph::sot::IntegratorEuler< sigT, coefT >::integrate | ( | sigT & | res, |
| int | time | ||
| ) | [inline, virtual] |
Implements dynamicgraph::sot::IntegratorAbstract< sigT, coefT >.
References dynamicgraph::SignalPtr< class, class >::access(), dynamicgraph::sot::IntegratorAbstract< sigT, coefT >::denominator, dynamicgraph::sot::IntegratorEuler< sigT, coefT >::inputMemory, dynamicgraph::sot::IntegratorAbstract< sigT, coefT >::numerator, dynamicgraph::sot::IntegratorEuler< sigT, coefT >::outputMemory, dynamicgraph::sot::IntegratorAbstract< sigT, coefT >::SIN, and sotDEBUG.
const std::string dynamicgraph::sot::IntegratorEuler< sigT, coefT >::CLASS_NAME [static] |
Reimplemented from dynamicgraph::sot::IntegratorAbstract< sigT, coefT >.
std::vector<sigT> dynamicgraph::sot::IntegratorEuler< sigT, coefT >::inputMemory [protected] |
std::vector<sigT> dynamicgraph::sot::IntegratorEuler< sigT, coefT >::outputMemory [protected] |

