Class that defines the motion of a point of the body wrt. another point. More...
#include <sot/core/feature-point6d-relative.hh>
Public Member Functions | |
| virtual const std::string & | getClassName (void) const |
| Returns the name class. | |
| FeaturePoint6dRelative (const std::string &name) | |
| virtual | ~FeaturePoint6dRelative (void) |
| virtual ml::Vector & | computeError (ml::Vector &res, int time) |
| Compute the error between the desired feature and the current value of the feature measured or deduced from the robot state. | |
| virtual ml::Vector & | computeErrorDot (ml::Vector &res, int time) |
| Callback for signal errordotSOUT. | |
| virtual ml::Matrix & | computeJacobian (ml::Matrix &res, int time) |
| Compute the Jacobian of the error according the robot state. | |
| virtual void | display (std::ostream &os) const |
| virtual void | commandLine (const std::string &cmdLine, std::istringstream &cmdArgs, std::ostream &os) |
| void | initCommands (void) |
| void | initSdes (const std::string &featureDesiredName) |
Public Attributes | |
| dg::SignalPtr < MatrixHomogeneous, int > | positionReferenceSIN |
| dg::SignalPtr< ml::Matrix, int > | articularJacobianReferenceSIN |
| dg::SignalPtr < MatrixHomogeneous, int > | dotpositionSIN |
| dg::SignalPtr < MatrixHomogeneous, int > | dotpositionReferenceSIN |
Static Public Attributes | |
| static const std::string | CLASS_NAME |
| Store the name of the class. | |
Protected Attributes | |
| ml::Matrix | L |
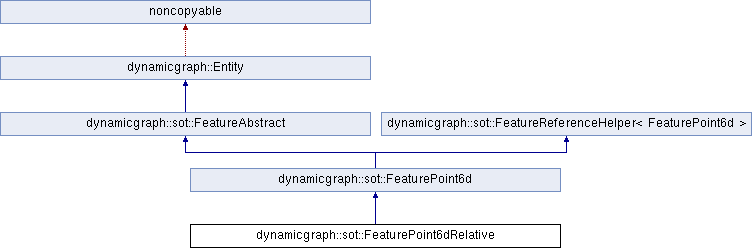
Class that defines the motion of a point of the body wrt. another point.
| dynamicgraph::sot::FeaturePoint6dRelative::FeaturePoint6dRelative | ( | const std::string & | name | ) |
| virtual dynamicgraph::sot::FeaturePoint6dRelative::~FeaturePoint6dRelative | ( | void | ) | [inline, virtual] |
| virtual void dynamicgraph::sot::FeaturePoint6dRelative::commandLine | ( | const std::string & | cmdLine, |
| std::istringstream & | cmdArgs, | ||
| std::ostream & | os | ||
| ) | [virtual] |
Reimplemented from dynamicgraph::sot::FeaturePoint6d.
| virtual ml::Vector& dynamicgraph::sot::FeaturePoint6dRelative::computeError | ( | ml::Vector & | res, |
| int | time | ||
| ) | [virtual] |
Compute the error between the desired feature and the current value of the feature measured or deduced from the robot state.
Reimplemented from dynamicgraph::sot::FeaturePoint6d.
| virtual ml::Vector& dynamicgraph::sot::FeaturePoint6dRelative::computeErrorDot | ( | ml::Vector & | res, |
| int | time | ||
| ) | [virtual] |
Callback for signal errordotSOUT.
Copy components of the input signal errordotSIN defined by selection flag selectionSIN.
Reimplemented from dynamicgraph::sot::FeatureAbstract.
| virtual ml::Matrix& dynamicgraph::sot::FeaturePoint6dRelative::computeJacobian | ( | ml::Matrix & | res, |
| int | time | ||
| ) | [virtual] |
Compute the Jacobian of the error according the robot state.
Reimplemented from dynamicgraph::sot::FeaturePoint6d.
| virtual void dynamicgraph::sot::FeaturePoint6dRelative::display | ( | std::ostream & | os | ) | const [virtual] |
Reimplemented from dynamicgraph::sot::FeaturePoint6d.
| virtual const std::string& dynamicgraph::sot::FeaturePoint6dRelative::getClassName | ( | void | ) | const [inline, virtual] |
Returns the name class.
Reimplemented from dynamicgraph::sot::FeaturePoint6d.
| void dynamicgraph::sot::FeaturePoint6dRelative::initCommands | ( | void | ) |
Reimplemented from dynamicgraph::sot::FeatureAbstract.
| void dynamicgraph::sot::FeaturePoint6dRelative::initSdes | ( | const std::string & | featureDesiredName | ) |
| dg::SignalPtr< ml::Matrix,int > dynamicgraph::sot::FeaturePoint6dRelative::articularJacobianReferenceSIN |
const std::string dynamicgraph::sot::FeaturePoint6dRelative::CLASS_NAME [static] |
Store the name of the class.
Reimplemented from dynamicgraph::sot::FeaturePoint6d.
| dg::SignalPtr< MatrixHomogeneous,int > dynamicgraph::sot::FeaturePoint6dRelative::dotpositionReferenceSIN |
Derivative of the reference position.
dg::Signals related to the computation of the derivative of the error
dg::Signals giving the derivative of the input signals.
Derivative of the relative position.

